Maximum likelihood mapmaking¶
[1]:
import maria
from maria.io import fetch
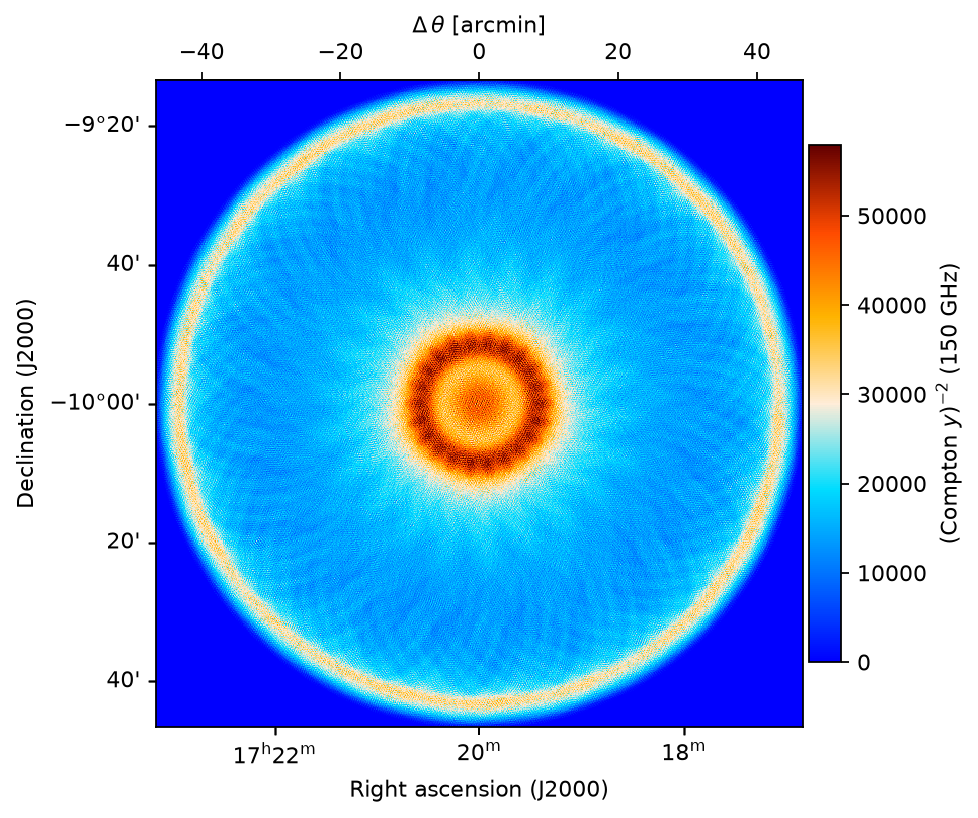
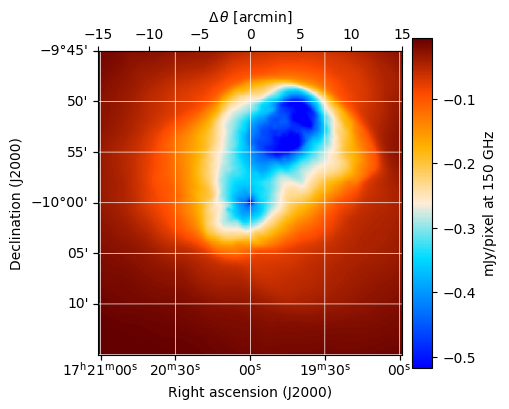
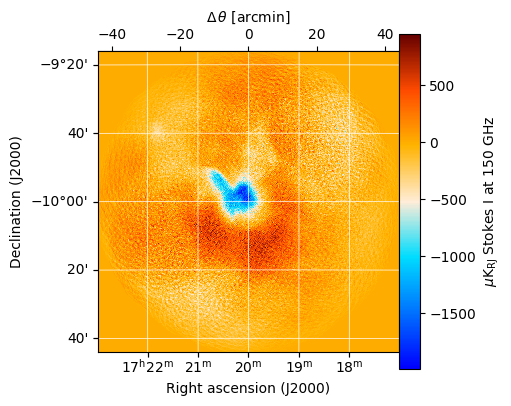
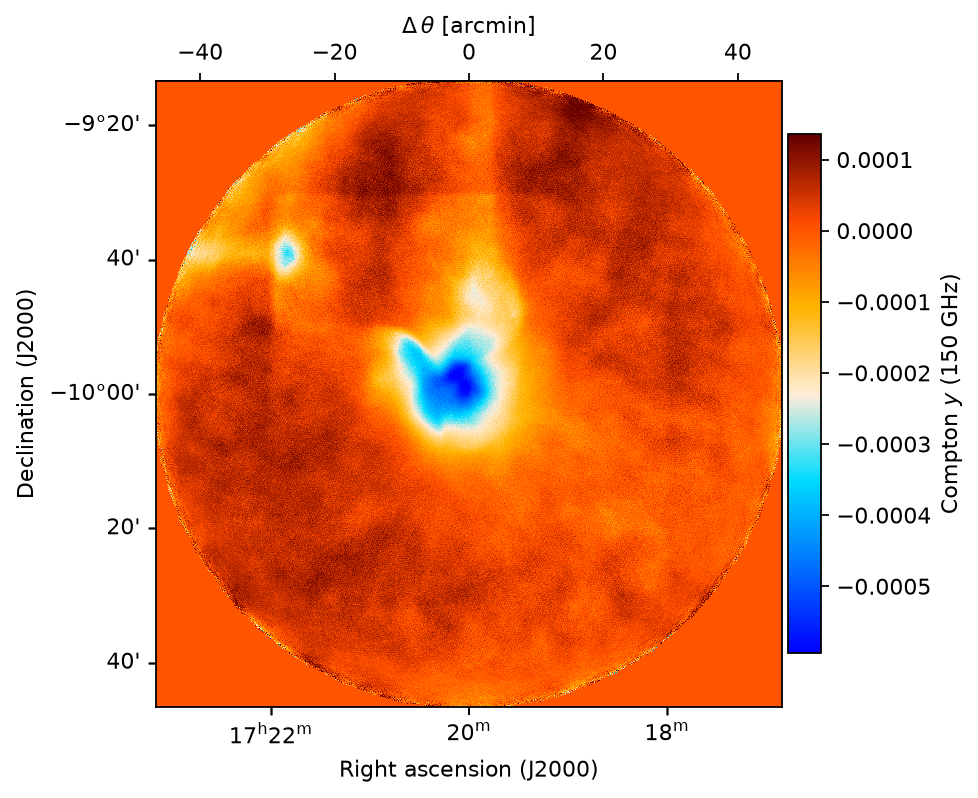
input_map = maria.map.get("maps/cluster2.fits", nu=150e9)
input_map.data *= 2e2
input_map.plot(cmap="cmb")
print(input_map)
2026-07-06 17:24:05.981 INFO: Fetching https://github.com/thomaswmorris/maria-data/raw/master/maps/cluster2.fits
Downloading: 100%|██████████| 4.20M/4.20M [00:00<00:00, 111MB/s]
ProjectionMap:
data(1, 1024, 1024):
min: -7.691e-04
max: -1.001e-06
units: compton_y
quantity: compton_y
nu(1):
values: [150.] GHz
eta(1024):
height: 59.94’
res: -3.516”
xi(1024):
width: 59.94’
res: 3.516”
frame: ra/dec
center:
ra: 17ʰ20ᵐ0.00ˢ
dec: -10°00’0.00”
beam(maj, min, psi): (0 rad, 0 rad, 0 rad)
memory: 4.194 MB
[2]:
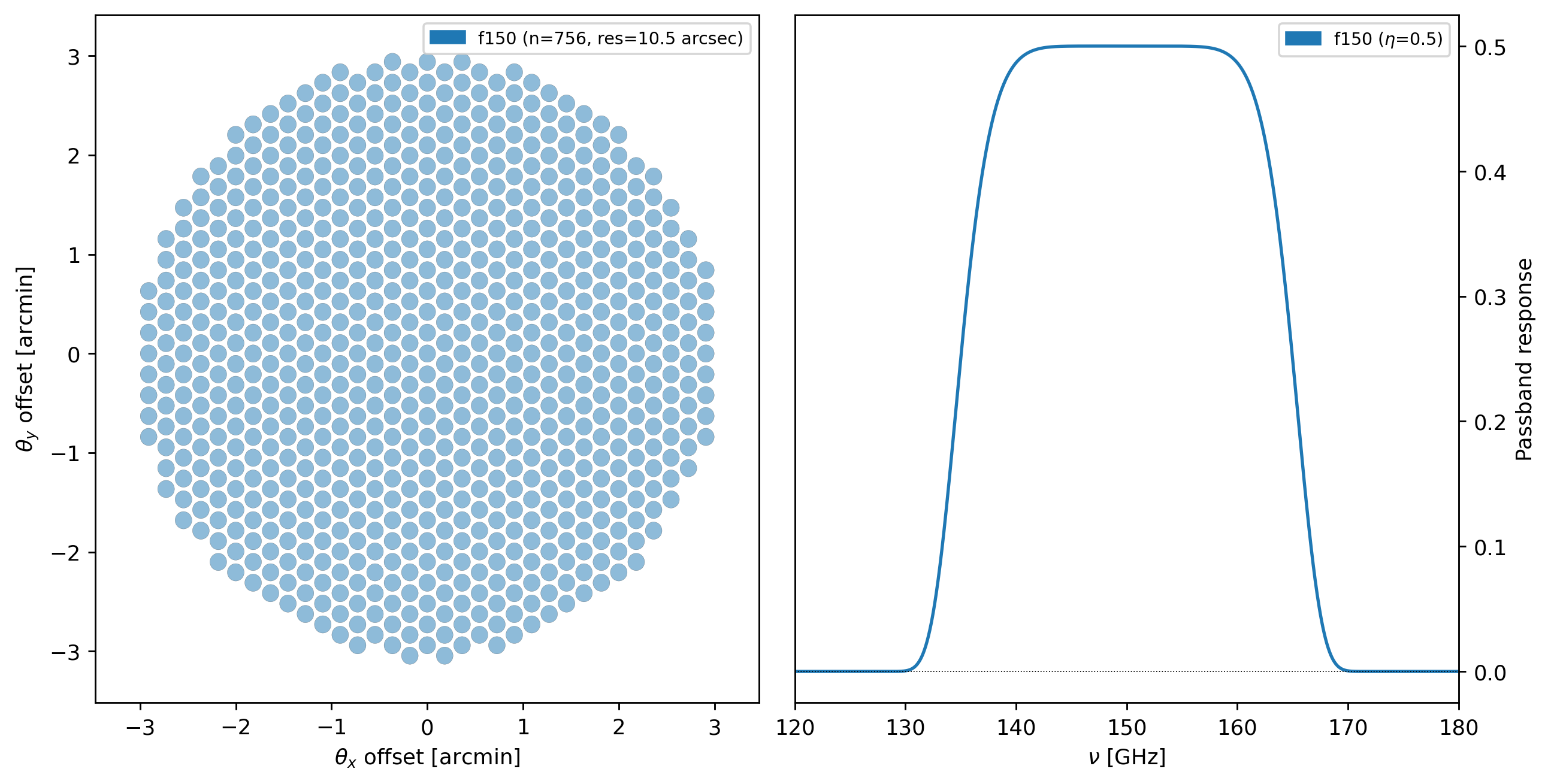
from maria.instrument import Band
f090 = Band(
center=150e9,
width=30e9,
NET_RJ=10e-6,
knee=5e1)
array = {"name": "my_custom_array",
"field_of_view": 4 / 60,
"primary_size": 30,
"n": 121,
"shape": "circle",
"bands": [f090]}
instrument = maria.get_instrument(array=array)
print(instrument)
instrument.plot()
Instrument(1 array)
├ arrays:
│ n field_of_view max_baseline bands polarized primary_size
│ my_custom_array 121 4’ 0 m [f150] False 30 m
│
└ bands:
name center width η NEP NET_RJ NET_CMB FWHM
0 f150 150 GHz 30 GHz 0.5 2.204 aW√s 10 uK_RJ√s 17.33 uK_CMB√s 17.5”
[3]:
import numpy as np
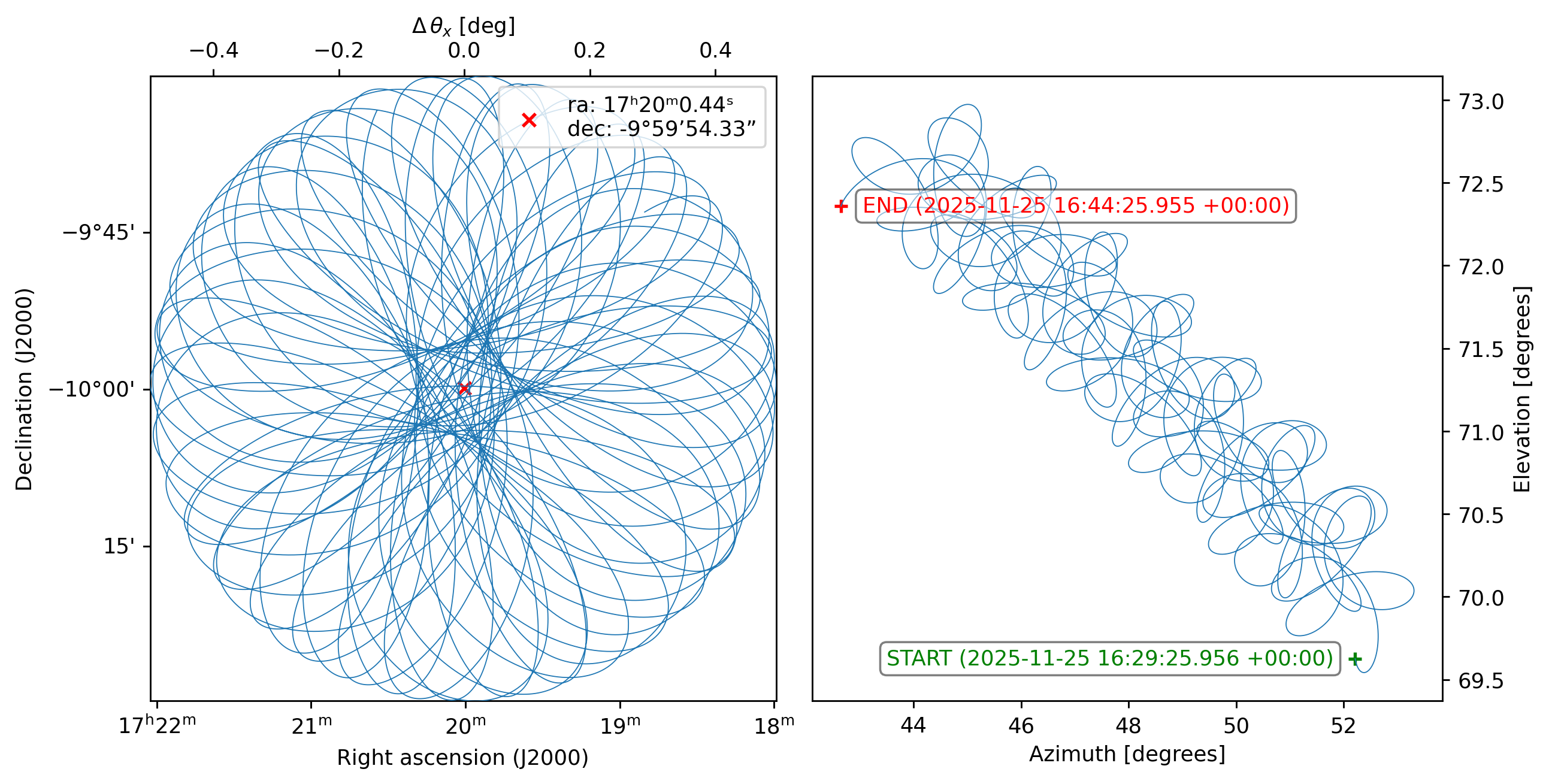
from maria import Planner
planner = Planner(start_time="2026-03-16T12:00:00",
target=input_map,
site="cerro_toco",
constraints={"el": (70, 90)})
plans = planner.generate_plans(
total_duration=2400,
max_chunk_duration=2400,
sample_rate=50,
scan_type="daisy",
scan_parameters={
"radius": 0.75 * input_map.width.deg,
"speed": 0.5,
})
plans[0].plot()
print(plans)
PlanList(1 plans, 2400 s):
start_time duration sample_rate target(ra,dec) center(az,el)
chunk
0 2026-03-17 09:10:00.000 +00:00 2400 s 50 Hz (260°, -10°) (40.06°, 73.54°)
[4]:
sim = maria.Simulation(
instrument,
plans=plans,
site="cerro_toco",
map=input_map,
atmosphere="2d",
atmosphere_kwargs={"weather": {"pwv": 0.5}, "layers": {"boundaries": [0, 1000]}},
)
print(sim)
Initializing observations: 0%| | 0/1 [00:00<?, ?it/s]
Constructing atmosphere: 0%| | 0/1 [00:00<?, ?it/s]
Constructing atmosphere: 100%|██████████| 1/1 [00:00<00:00, 1.52it/s]
Initializing observations: 100%|██████████| 1/1 [00:03<00:00, 3.31s/it]
Simulation
├ Instrument(1 array)
│ ├ arrays:
│ │ n field_of_view max_baseline bands polarized primary_size
│ │ my_custom_array 121 4’ 0 m [f150] False 30 m
│ │
│ └ bands:
│ name center width η NEP NET_RJ NET_CMB FWHM
│ 0 f150 150 GHz 30 GHz 0.5 2.204 aW√s 10 uK_RJ√s 17.33 uK_CMB√s 17.5”
├ Site:
│ region: chajnantor
│ timezone: America/Santiago
│ location:
│ longitude: 67°47’16.08” W
│ latitude: 22°57’30.96” S
│ altitude: 5.19 km
│ seasonal: True
│ diurnal: True
├ PlanList(1 plans, 2400 s):
│ start_time duration sample_rate target(ra,dec) center(az,el)
│ chunk
│ 0 2026-03-17 09:10:00.000 +00:00 2400 s 50 Hz (260°, -10°) (40.06°, 73.54°)
├ Atmosphere(1 processes with 1 layers):
│ ├ spectrum:
│ │ region: chajnantor
│ └ weather:
│ region: chajnantor
│ altitude: 5.19 km
│ time: Mar 17 06:29:59 -03:00
│ pwv[mean, rms]: (500 um, 15 um)
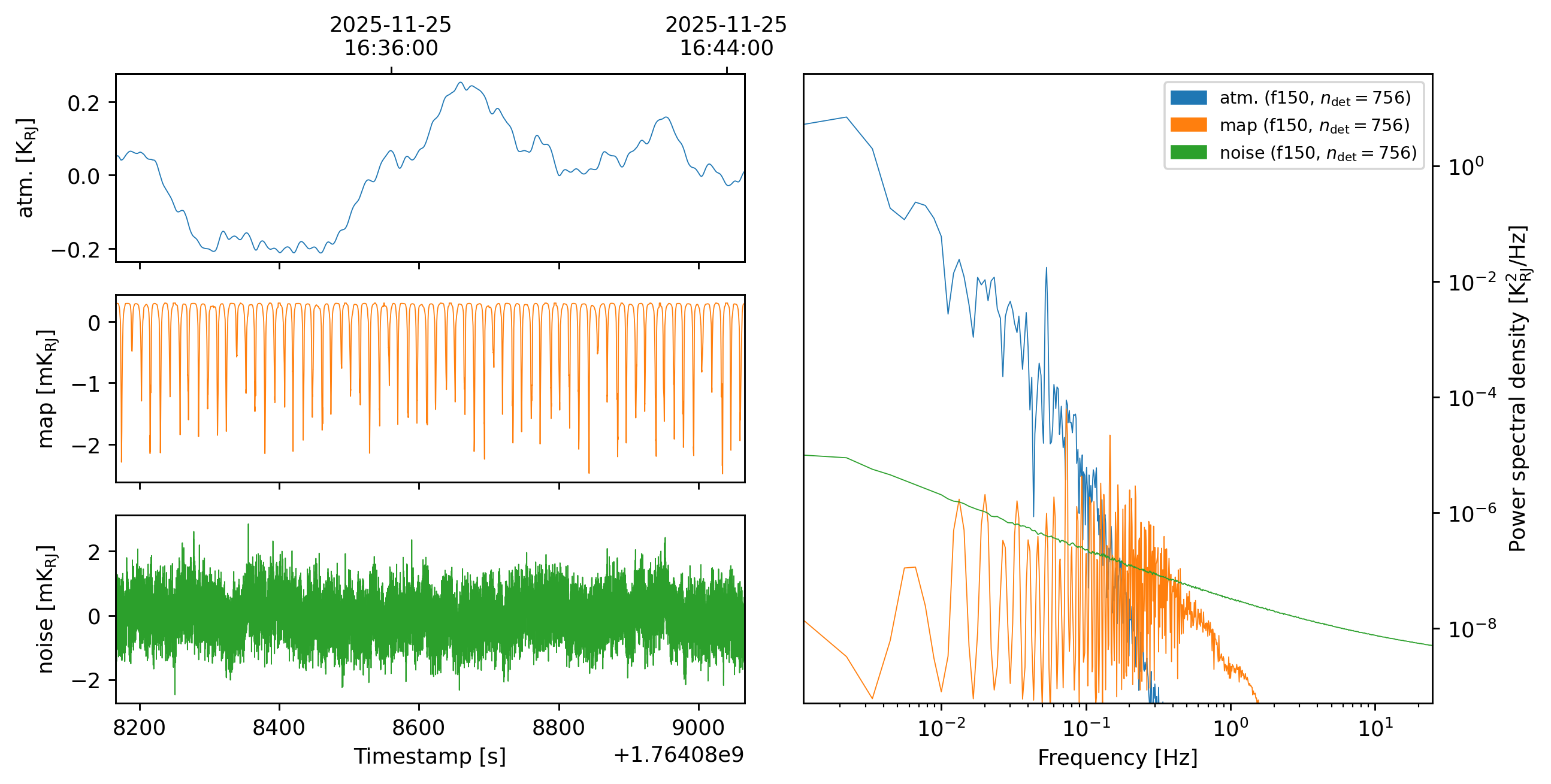
[5]:
tods = sim.run()
tods[0].plot()
2026-07-06 17:24:18.656 INFO: Simulating observation 1 of 1
Generating turbulence: 100%|██████████| 1/1 [00:00<00:00, 13.11it/s]
Sampling turbulence: 100%|██████████| 1/1 [00:01<00:00, 1.43s/it]
Computing atmospheric emission: 100%|██████████| 1/1 [00:01<00:00, 1.03s/it, band=f150]
Sampling source 'map': 100%|██████████| 1/1 [00:08<00:00, 8.56s/it, band=f150, message=Sampling channel (105 GHz, 195 GHz)]
Generating noise: 100%|██████████| 1/1 [00:01<00:00, 1.49s/it, band=f150]
2026-07-06 17:24:35.404 INFO: Simulated observation 1 of 1 in 16.74 s
We can map the TOD with the MaximumLikelihoodMapper
[6]:
from maria.mapping import MaximumLikelihoodMapper
ml_mapper = MaximumLikelihoodMapper(tods=tods,
tod_preprocessing={
"remove_polynomial": {"time": 1, "elevation": 1},
},
init="bin",
units="compton_y")
2026-07-06 17:24:40.116 INFO: Inferring resolution = 8.748” from detector FWHM
2026-07-06 17:24:42.393 INFO: Inferring center {'ra': '17ʰ19ᵐ59.95ˢ', 'dec': '-9°59’59.37”'} for mapper
2026-07-06 17:24:42.405 INFO: Inferring mapper width 1.554° for mapper from observation patch
2026-07-06 17:24:42.406 INFO: Inferring mapper height 1.554° to match supplied width
2026-07-06 17:24:49.056 INFO: Inferring stokes parameters 'I' for mapper from detector sensitivities
Preprocessing TODs: 100%|██████████| 1/1 [00:06<00:00, 6.41s/it]
Computing pointing matrices: 100%|██████████| 1/1 [00:03<00:00, 3.32s/it]
[ ]:
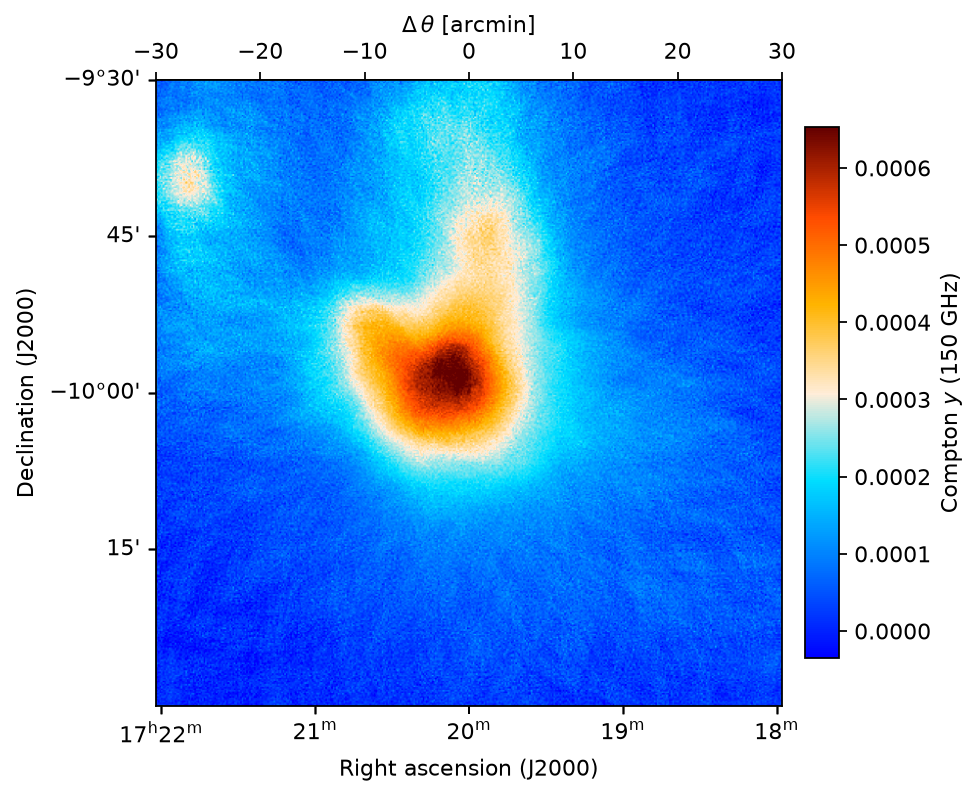
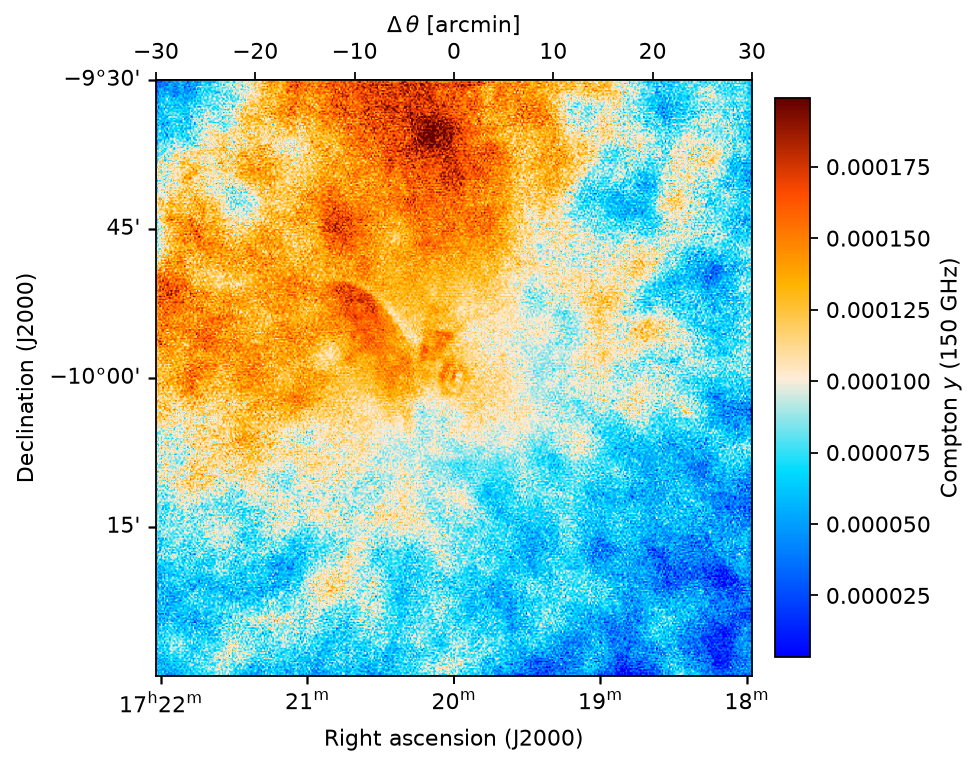
The initial solution is just a binning of the data, which has some noise artifacts and is missing some power (especially at large scales):
[7]:
from maria.mapping import compute_residual_map
print(ml_mapper.map)
ml_mapper.map.plot()
residual_map = compute_residual_map(input_map, ml_mapper.map)
residual_map.plot()
ProjectionMap:
data(1, 639, 639):
min: -5.391e-04
max: 5.291e-04
units: compton_y
quantity: compton_y
nu(1):
values: [150.] GHz
eta(639):
height: 1.55°
res: -8.748”
xi(639):
width: 1.55°
res: 8.748”
frame: ra/dec
center:
ra: 17ʰ19ᵐ59.95ˢ
dec: -9°59’59.37”
beam(maj, min, psi): (17.5”, 17.5”, 0 rad)
memory: 3.267 MB
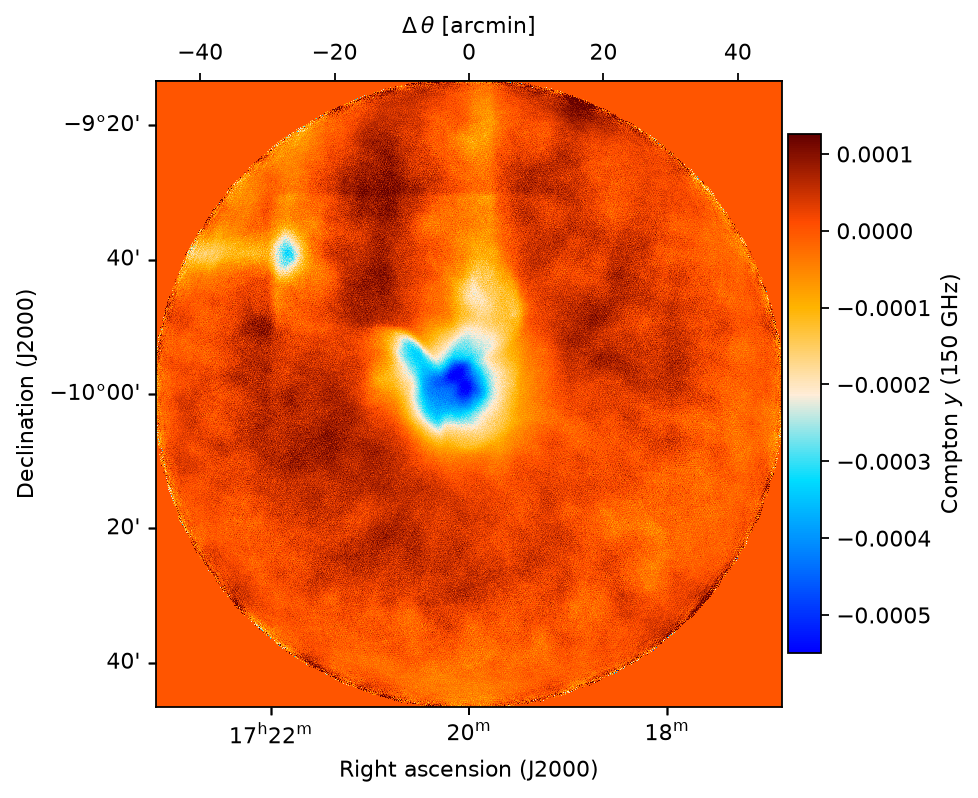
To improve the map, we build a noise model perform conjugate gradient descent to solve the mapmaking equation \(m = (P^\top N^{-1} P)^{-1} P^\top N^{-1} d\) where \(m\) is the map, \(P\) is the pointing matrix, \(N = \langle n \otimes n \rangle\) is the noise covariance, \(d = Pm + n\) is the data, and \(n\) is the noise.
[8]:
ml_mapper.fit(epochs=2, max_steps_per_epoch=50, plot=True)
Updating noise model: 100%|██████████| 1/1 [00:03<00:00, 3.91s/it, tod=1/1]
Fitting map (epoch 1/2): 50it [01:53, 2.28s/it, alpha=78]
Updating noise model: 100%|██████████| 1/1 [00:03<00:00, 3.84s/it, tod=1/1]
Fitting map (epoch 2/2): 50it [01:53, 2.27s/it, alpha=78.6]
[9]:
from maria.mappers import compute_residual_map
residual_map = compute_residual_map(input_map, ml_mapper.map)
residual_map.plot()
and our inverse variance map looks like
[10]:
ml_mapper.map.plot(attr="weight")